Autonomes Fahren im ÖPNV
Lektion 3
Gibt es schon autonomen Nahverkehr?
Sonia nimmt an einer Konferenz teil. In ihrem Workshop mit dem Titel „Autonomer Nahverkehr der Zukunft“ stellt sie vor, wie ihr Verkehrsbetrieb autonome Züge und Busse einsetzen möchte. Diese sollen von einem zentralen System überwacht werden, wofür jedoch noch Datenschnittstellen und eine zuverlässige 5G-Verbindung fehlen.
Sie nennt Beispiele aus anderen Ländern, etwa Kanada und Dänemark, und aus Nürnberg, wo bereits seit mehreren Jahren autonome U-Bahn-Linien fahren. Diese arbeiten nahezu störungsfrei und sind sowohl bei Stadtbewohner*innen als auch bei Tourist*innen sehr beliebt.

{kind=link}
Sonia erklärt, dass öffentliche autonome Kleinbusse besonders gut geeignet sind, Autos zu ersetzen, indem sie die Strecken bis zur nächsten ÖPNV-Station abdecken. Eine Herausforderung für die darin verwendeten KI-Systeme ist es allerdings, zu entscheiden, welche Informationen (zum Beispiel von Verkehrszeichen) im jeweiligen Kontext relevant sind und welche nicht.
Nimmt das System Störungen auf der Strecke wie beispielsweise stark verschmutzte, mit Aufklebern versehene oder beschädigte Verkehrszeichen wahr, sorgt es im Zweifelsfall dafür, dass das Fahrzeug anhält. Das ist immer die sicherste Option, kann aber zu Störungen im Verkehrsfluss und schlimmstenfalls auch zu Unfällen führen.

Wie funktionieren KI-Systeme eigentlich?
KI-Systeme, die auf maschinellem Lernen basieren, werden mit zahlreichen Daten gefüttert und lernen, daraus Muster zu erkennen. Das Gelernte wird Modell genannt. Im Falle der Bilderkennung bekommt ein solches Modell zum Beispiel tausende Bilder von Verkehrszeichen vorgelegt, die von Menschen in Kategorien vorsortiert wurden (etwa Stopp- oder Tempolimit-Schilder).
Das Modell lernt durch millionenfaches „Anschauen“ der Bilder, welche Muster charakteristisch für das jeweilige Verkehrssymbol sind. Es ist aber Vorsicht geboten: Stehen alle Stoppschilder auf den Bildern am rechten Bildrand und alle Vorfahrtsschilder am linken Bildrand, könnte das Modell lernen, dass ein Schild auf der rechten Seite immer ein Stoppschild ist.
Eine solche Annahme wäre falsch und muss durch eine gute Auswahl der Bilder vermieden werden. Nach dem Training mit bekannten Bildern kann dem Modell zum Beispiel ein unbekanntes Bild gezeigt werden. Es gibt dann eine Wahrscheinlichkeit dafür ab, dass es beispielsweise um ein Stoppschild handelt. Basierend auf solchen Berechnungen entscheidet dann ein autonomes Fahrzeug, ob es bremsen muss.
Welche Datenflüsse gewährleisten Sicherheit im ÖPNV?
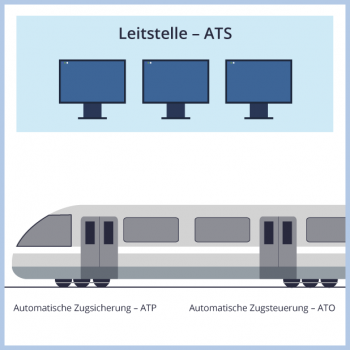
Autonomer ÖPNV kommuniziert ständig über Funk und Sensoren mit der Leitstelle. Besonders wichtig im autonomen ÖPNV ist die automatische Zugsteuerung, die unter anderem dafür sorgt, dass die Türen korrekt schließen.
Die Zugsicherung ist für Geschwindigkeit und Abstand zu anderen Bahnen zuständig. Damit diese Systeme entsprechende Daten bekommen und funktionieren können, sind Sensoren entlang der Strecke und in den Bahnen nötig.
Zur Sicherheit im ÖPNV tragen einige technische Systeme bei:
Leitstelle (ATS)
Alle autonomen Bahnen kommunizieren permanent per Funk mit der Leitstelle und untereinander. Sensoren auf der Strecke erfassen die Position der einzelnen Züge, um Kollisionen zu vermeiden.
Automatische Zugsicherung (ATP)
Sie errechnet und kontrolliert die Geschwindigkeit der Bahnen sowie die Abstände zwischen ihnen. Die Daten fließen weiter an die Leitstelle.
Automatische Zugsteuerung (ATO)
Dieses System ist für das Fahren zuständig. Anfahren, Stoppen sowie Öffnen und Schließen der Türen funktionieren automatisch. Ein „Dashboard“ zeigt stets die aktuelle Datenlage an, mögliche Fehler werden an die Leitstelle gemeldet.
Bahnsteigtüren
Diese Türen sind fest zwischen Bahnsteig und Fahrtrasse installiert und bilden eine zusätzliche Absicherung zu den Türen der Züge, damit keine Fahrgäste auf die Schienen fallen können. Wann die Türen geöffnet werden sollen, melden Sensoren an der Strecke. An einem Münchner U-Bahnsteig sollen Bahnsteigtüren voraussichtlich 2023 in den Probebetrieb gehen.
Exercise:
Gut aufgepasst? Teste dein Wissen!
Wie interagiert autonomer ÖPNV mit Passanten?
Während autonome S- und U-Bahnen bereits recht sicher unterwegs sind, gibt es beim ÖPNV auf der Straße zusätzliche Herausforderungen. Das kaum vorhersehbare Verhalten von Passant*innen stellt dabei ein großes Problem dar.
Sogenannte passive Sicherheitssysteme sollen zur automatischen Erkennung von Fußgänger*innen beitragen, indem diese von Kameras erfasst werden. Jedoch gibt es dabei zwei Fehlerquellen:
1. Das System erkennt Passant*innen nicht, sodass der Bus weiterfährt.
2. Das System identifiziert fälschlicherweise Passant*innen und bremst oder weicht aus.

Fehlerquellen und der richtige Umgang damit werfen wichtige rechtliche und ethische Fragen auf. Bei automatisierten Systemen spielt der menschliche Faktor meist keine Rolle, wenn es zum Unfall kommt. Wer trägt also die Verantwortung? Und wie sollen die Systeme aufgebaut sein, damit sie möglichst sicher sind?
Die Frage ist nicht, ob das ÖPNV-Fahrzeug 99,9 Prozent aller Hindernisse erkennt. Dabei handelt es sich um eine technisch lösbare Herausforderung. Die Frage ist, welche Maßnahmen bei Erkennen eines Hindernisses eingeleitet werden. Hier gibt es noch viel Entwicklungsbedarf.

Exercise:
Autonome Fahrzeuge mit einem KI-System treffen nur Entscheidungen, für die sie ausreichend Daten haben. Da insbesondere das Verhalten von Fußgänger*innen schwer vorherzusehen und zu messen ist, stellt sich die Frage, wer im Notfall Entscheidungen trifft.
Ist ein völlig autonomer ÖPNV wünschenswert?
Ein neuer Bus ist die Attraktion in der estnischen Hauptstadt Tallinn: Er fährt autonom und ohne Fahrer*in. Der Mini-Bus für etwa ein Dutzend Personen fährt derzeit noch mit verringertem Tempo durch die Innenstadt. Dafür braucht es Sensorik und Kameras, um die Umgebung des Busses aufzunehmen.
Der Bus fährt auf einer fest vorgegebenen Strecke und wird nonstop von einer Zentrale überwacht. Dieses Pilotprojekt soll der erste Schritt sein hin zu einem vollständig autonomen Elektrobusverkehr. Die größte Herausforderung ist hier das Verhalten der anderen Verkehrsteilnehmer*innen, die diese fahrerlosen Fahrzeuge nicht gewohnt sind.

Das Beispiel aus Estland zeigt, dass der autonome Nahverkehr auf der Straße noch viel mehr Daten benötigt, um funktionieren zu können. In Tunnelsystemen wie etwa in der Nürnberger U-Bahn ist man diesbezüglich schon weiter.
Der Verkehr läuft hier „störungsfrei“ ab, also etwa ohne Passant*innen, oder kann durch Bahnsteigtüren geregelt werden. Die Kommunikation zwischen autonomem ÖPNV-Verkehrsmitteln und Menschen ist dagegen viel komplizierter.
Exercise:
Teste dein Wissen!